上期 Go 文章说道了 Go 内置数据结构,从底层源码角度简单地描述了 channel。今天继续分析其他的内置数据结构 Timer。
Timer
Timer 在 golang 1.14 版本以前比较简单,整个 Timer.go 文件中代码 才 700 行左右。整个代码就是一个数据结构和许多 goroutine。但 golang 到了 1.14 版本以后,由于官方的升级维护就变得非常复杂。所以这里笔者简单讲一下 Timer 的迭代历史,状态机制不会涉及到。
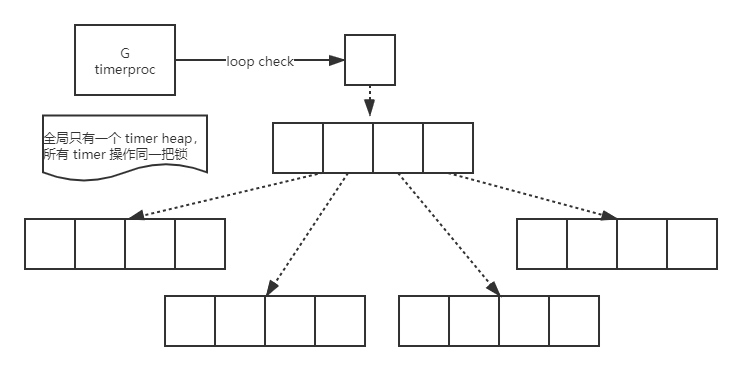
从这张图可以看到**,最早的 Timer 就是一个四叉堆**。我们平时写算法的时候二叉堆见得比较多,那是不是理解这个更困难?不是的,我们着重看 Timer 的结构和演进。像最早的 time.Sleep 或者 time.After 这两个函数,实际上我们创建了两个 Timer 类,这个 Timer 会最终加到我们的 runtime 维护的四叉堆里面。这个四叉堆其实是很好理解的,其实是有个基准的。
堆顶要放什么元素,元素如何排列?都是以触发时间为准。也就是说离当前时间最近的,一定是在堆顶的。如果来了一个新的 Timer ,它是在这个时间之后,它就会继续往堆下面走。如果比堆顶小就会涉及到对当前四叉堆的调整了,这个和写二叉堆调整算法很类似。
最老的 Timer 实现全局只有一个四叉堆,这个四叉堆专门启用一个叫做 timerproc 的 goroutine。这个 goroutine 的逻辑也不复杂,就是用一个 for 循环。这个 for 循环会不断地检查堆顶元素是不是已经到期了,如果到期了就会触发,在触发的同时会逐渐地调整堆,直到把所有需要触发的 Timer 都触发完毕为止,继续去休眠。
但这种单一的四叉堆会有一个问题。当前 Go 程序所有的 goroutine 在执行 Timer 相关操作的时候都需要去抢占操作这个堆的全局锁,而其实这个锁都是写锁。如果并发量很高,那么就会导致程序整体的吞吐量下降。全局锁对于任何程序来说,性能影响都比较大,这个问题导致了 go 程序在多核处理器上性能不佳,有人专门提了一个 issues:https://github.com/golang/go/issues/15133。(就 python 来说, 虽然 python 支持多进程,也支持多线程。但因为 GIL 全局解释器锁的存在,python 的多线程程序在同一时间只有一个线程在运行。所以多线程 Python 程序只是并发,而不是并行)
在有人提出了性能问题之后,官方就对这个问题去做了优化。官方的思路是这样的:既然一个堆和一把锁是有性能问题的,是否可以尝试将单个四叉堆扩展为多个四叉堆呢,尽量把并发性能提升。也就是说降低锁的粒度,也可以说是分片锁。来看一下图就能快速理解:
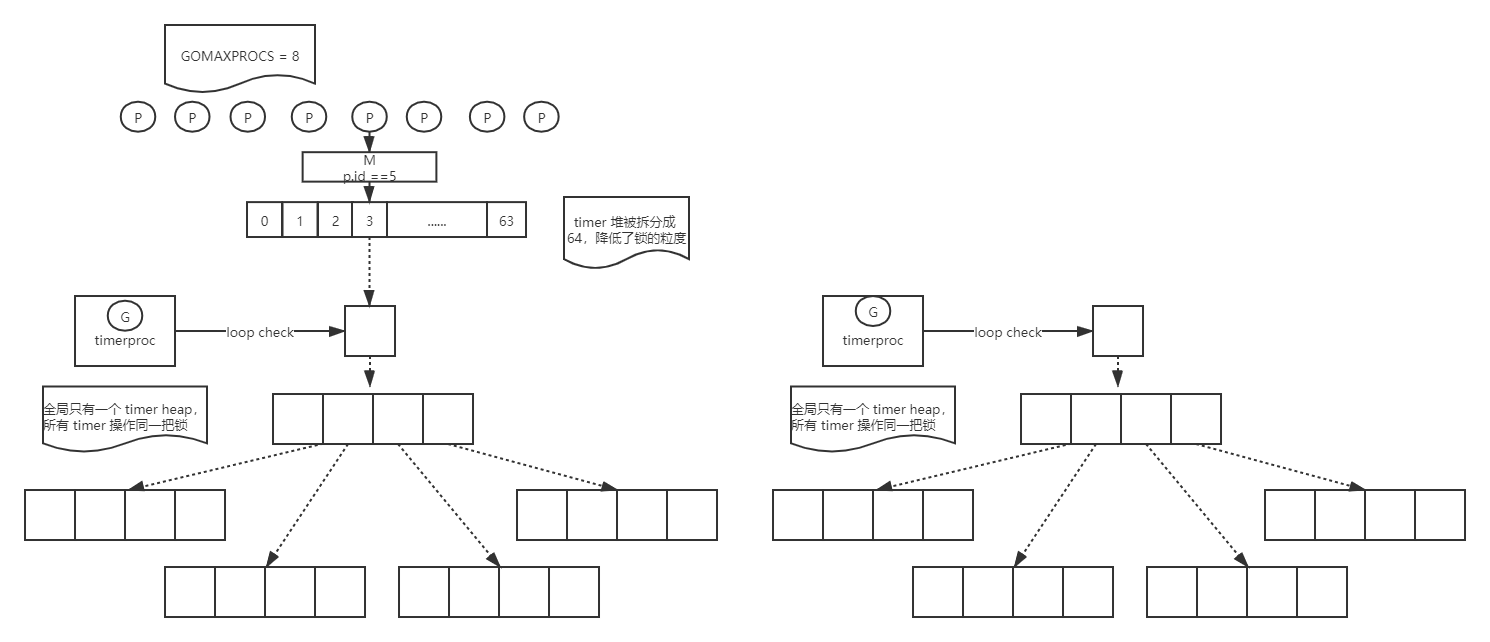
官方写死了一些东西,最多只有 64 个四叉堆。但一般不会有这么多。比如 GOMAXPROCS = 8,那么 P 结构有 8 个,每个 P 在执行调度循环的时候会绑定一个线程 M ,线程上正在执行 G。因此,每个 P 下面都会关联到一个 timer 的 G 。
但这种结构又会出现一个问题,社区中还有人提出问题:Go 程序在执行密集计算任务时会导致 timer 唤醒延迟。因此官方又做了改进,从这个版本往后,TImer 极其复杂了。
因此总结一下 Timer 1.14 的变化情况:
- 调整:
- Timer headp 和 GMP 中的 P 绑定
- 去除唤醒 goroutine:timerproc
- 检查:
- 检查 timer 到期在特殊函数 checkTimer 中进行
- 检查 timer 操作移至调度循环中进行
- 工作窃取:
- 在 work-stealing 中,会从其他 P 那里偷 timer
- 兜底:
- runtime.sysmon 中会为 timer 未被触发(timeSleepUntil)兜底,启动新线程
这里悄悄透露一下两个找源码的地方:
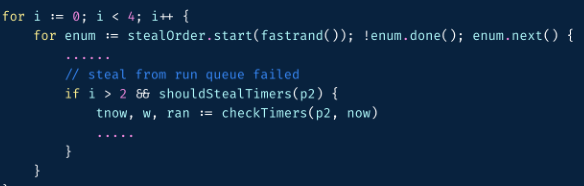
偷 timer
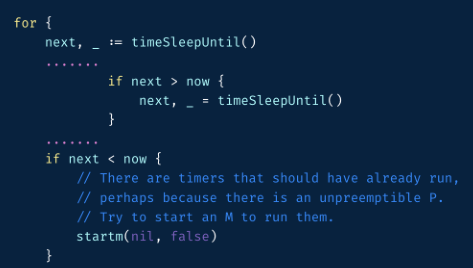
runtime.sysmon 兜底